路径规划之采样搜索算法
采样搜索算法基础
两项基本任务
Exploration
获得关于搜索空间拓扑结构的信息,即空间的子集是如何连接的。
Exploitation
通过处理探索任务计算出的可用信息,逐步改进解决方案。
术语
Probabilistic Completeness(概率完备)
如果存在一个可行的解决方案,那么当样本数量接近无穷大时,将以1的概率找到该解决方案。
Asymptotical(Near) Optimality(渐进最优/几乎最优)
当样本数接近无穷大时,返回的解决方案的成本几乎肯定会收敛到最优。
Anytime
快速找到一个可行的但不一定是最优的解决方案,然后随着时间的推移逐步改进。
概率路图算法(Probabilistic Road Map, PRM)
Learning phase
在配置空间中随机撒点,构建一个可以代表环境的连通图
在配置空间中随机采样
检测出无碰撞的采样点
连接最近的点生成边
删除有碰撞的边
Query phase
通过图搜索算法找到一条从起点通往终点的路径
提升效率的方法
Lazy Collision-Checking
在不考虑碰撞的情况下由采样点生成边
在不进行碰撞检测的情况下生成路径
检测路径上的点和边是否是无碰撞的
快速生成随机树算法(Rapidly-exploring Random Trees, RRT)
RRT以一个初始点作为根节点,通过随机采样增加叶子节点的方式,生成一个随机扩展树,当随机树中的叶子节点包含了目标点或进入了目标区域,便可以在随机树中找到一条由从初始点到目标点的路径。
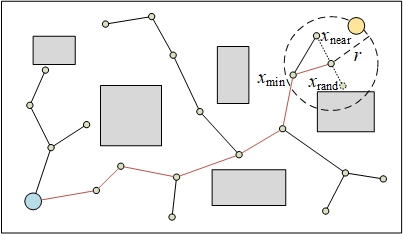
RRT算法流程
在配置空间中随机采样得到采样点
在搜索树中找出距离采样点
计算
如果
如下图所示:
算法效果如下:
提高效率的方法
RRT-Connet
在RRT的基础上引入双树拓展环节,即分别以起点和目标点为根节点生成两棵树进行双向拓展。通过一次采样得到一个采样点
算法效果如下:
RRT*
RRT*算法流程
其算法流程与RRT算法流程基本相同,变化在于在最后将
在选择父节点时,在以
示意图如下:
算法效果如下:

提高效率的方法
Bias Sampling
向目标节点采样
Sample Rejection
当
Branch-and-bound (Tree Pruning)
将无希望的子树直接放弃
Graph Sparsify
按分辨率拒绝采样点
Delay Collision Check
按潜在的代价值对邻居进行排序。按顺序检查碰撞,一旦发现无碰撞的边就停止。
Bi-directional search
从起点和终点同时生长树
Conditional Rewire
重新布线直到找到第一个解决方案。
Data Re-use
为选择父节点和重新布线存储碰撞检测的结果
RRT#
RRT*的缺陷
over-exploitation
对无希望的节点重新布线
under-exploitation
只有在新节点添加到生成树时才重新布线,并且只在该节点的附件重新布线
中间迭代的最优路径不能保证是最优的
Informed Sampling
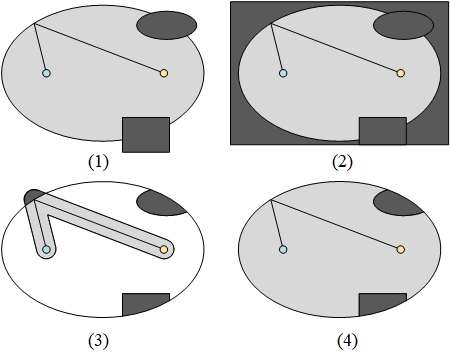
Informed Set
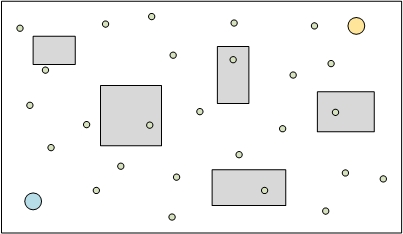
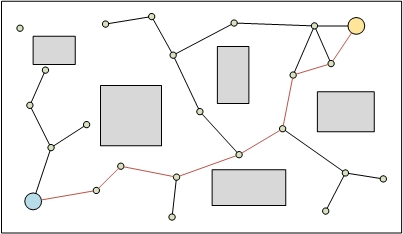
如图(1)所示,深灰色部分为障碍物,浅灰色部分为理想的搜索范围。
估计方法表示如下:
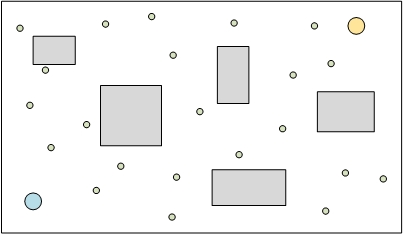
Bonding boxes
矩形、立方体形式的边界,如图(2)所示
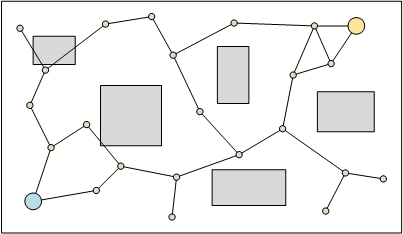
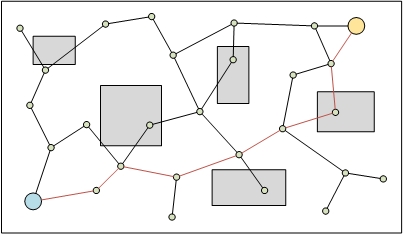
Path heuristics
在规划好的路径周围形成边界,如图(3)所示
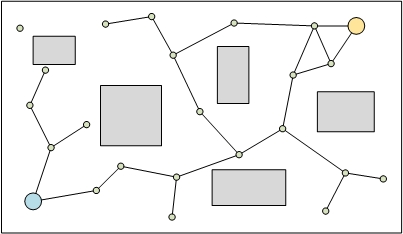
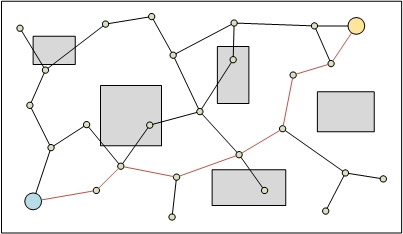
以椭圆为边界,如图(4)所示
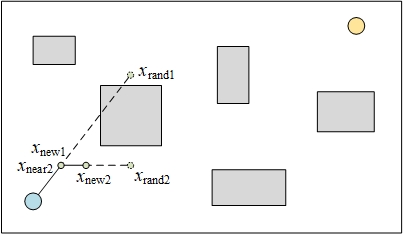
Guided Incremental Local Densification (GuILD)
Local Subsets
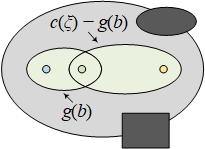
如图所示,LSs具有如下特性:
LSs是IS的子集
LSs的范围不会超过IS