MATLAB/Simulink 与 ROS 连接方法
本方法基于Ubuntu 18.04 ROS Melodic 和 MATLAB 2023a 软件制作
Ubuntu设置
进入 Ubuntu 系统,打开终端,输入
ifconfig查看IP地址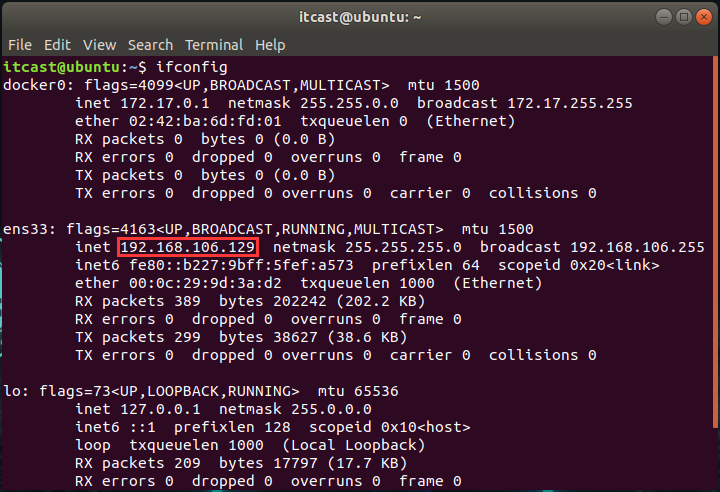
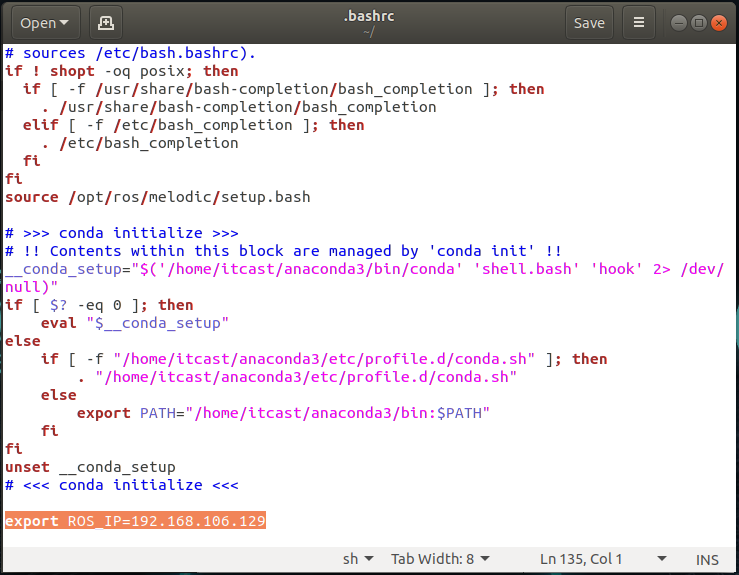
打开
~/.bashrc文件,根据IP地址添加如下语句1export ROS_IP=IP地址如图所示:
若找不到
~/.bashrc文件,可以尝试如下步骤: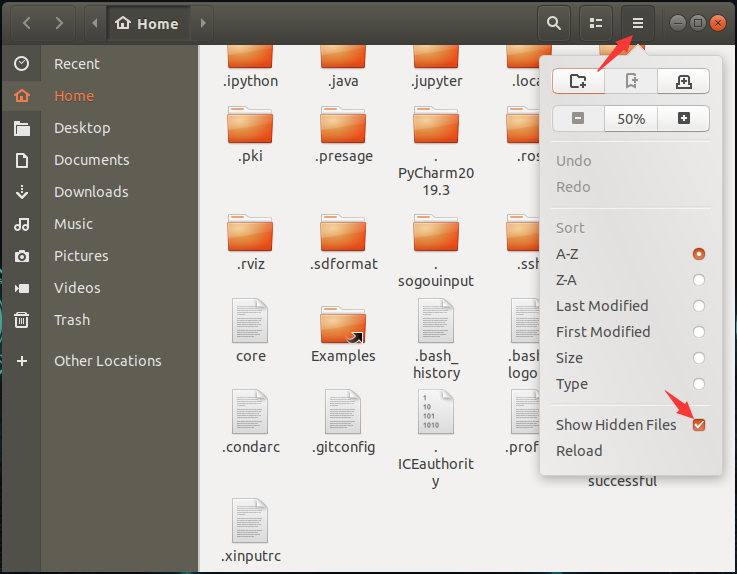
将 MATLAB 与 ROS 连接
在 Ubuntu 系统命令行中输入
roscore启动 ROS master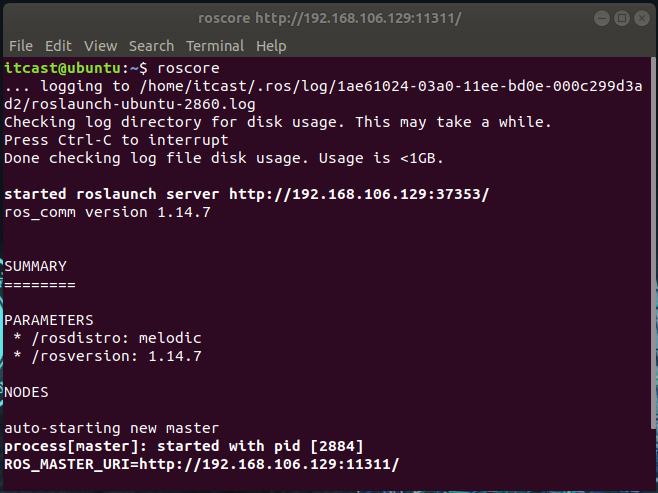
在 MATLAB 命令行中,根据 Ubuntu 系统的 IP 地址输入如下命令:
xxxxxxxxxx11setenv('ROS_MASTER_URI','192.168.106.129:11311')
继续输入
rosinit让 MATLAB 与 ROS 建立连接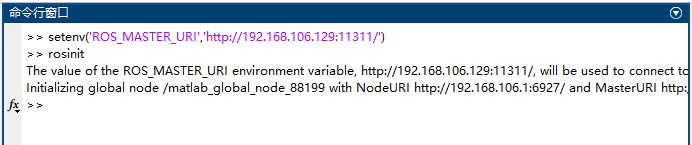
输入
rostopic list可以查看已经注册到 ROS master 的话题
使用 Simulink 与 ROS 实现话题通讯
前期准备
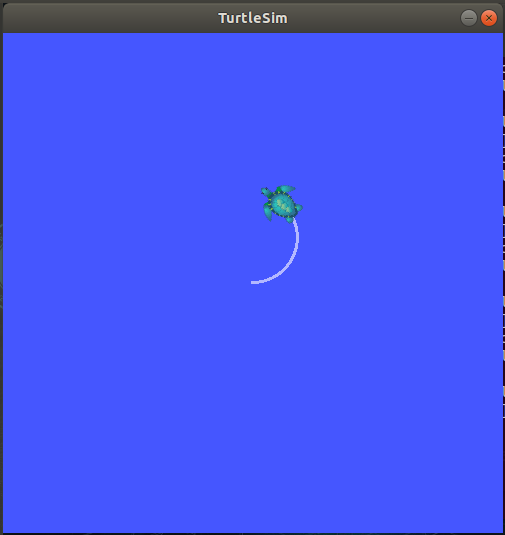
在 Ubuntu 系统的命令行输入如下命令运行小乌龟
xxxxxxxxxx11rosrun turtlesim turtlesim_node在Simulink中主要使用到的模块有:
模块 功能 Blank Message 用于选择话题的数据类型 Bus Assignment 用于给话题赋值 Bus Selector 用于选择话题中的某些变量 Publish 用于发布话题 Subscribe 用于接收话题 Real-Time Synchronization 用于与现实时间同步 如果在simulink仿真时提示
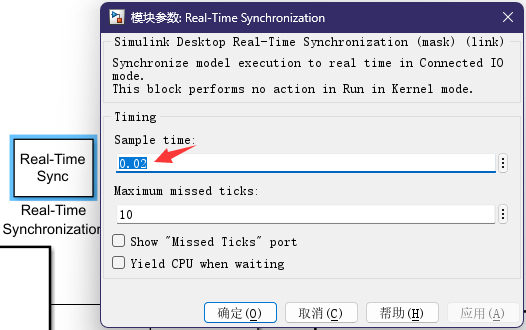
Real-Time Kernel未安装,可以在MATLAB命令行中输入如下命令xxxxxxxxxx11sldrtkernel -install考虑到 ROS 的通信频率为20Hz,将 Simulink 的基础采样时间设置为
0.02,如图所示: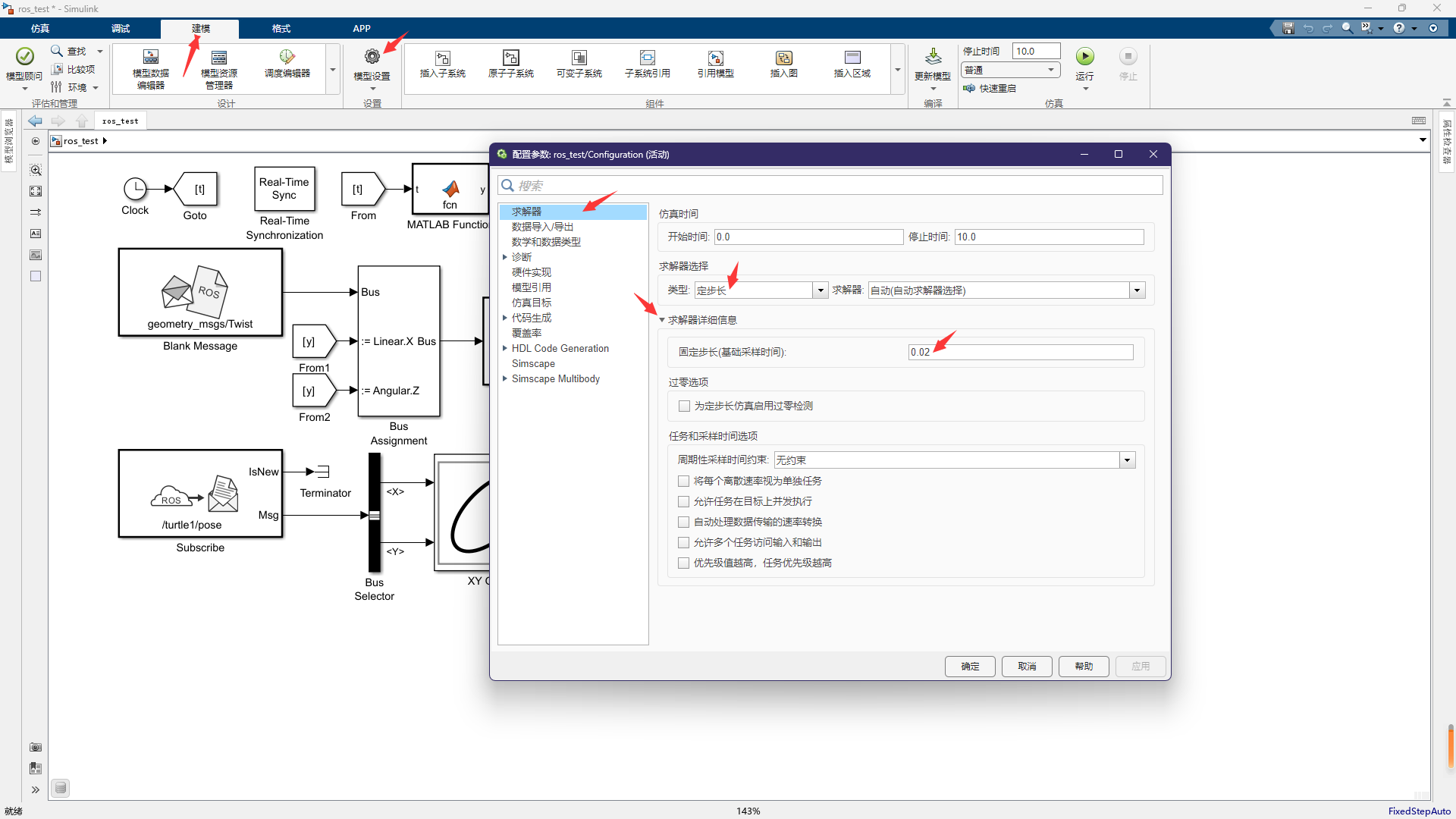
使用 Simulink 发布和订阅话题
打开 Simulink 按下图搭建仿真:
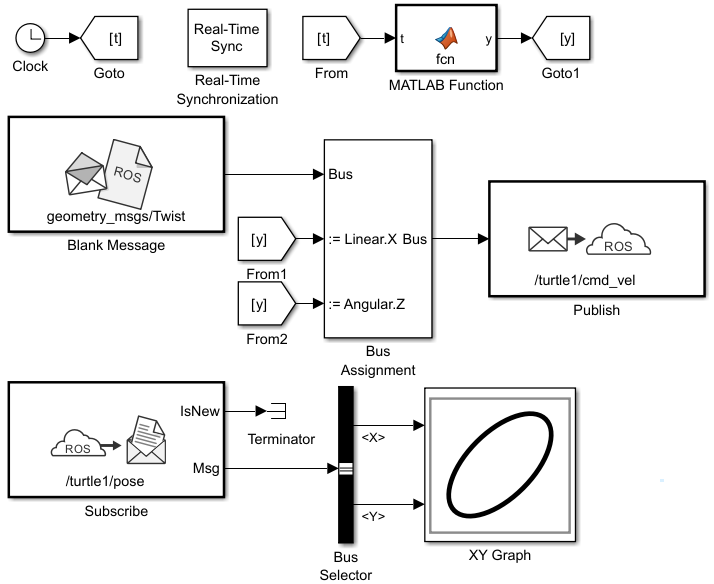
上述模块分别设置如下:
Real-Time Synchronization
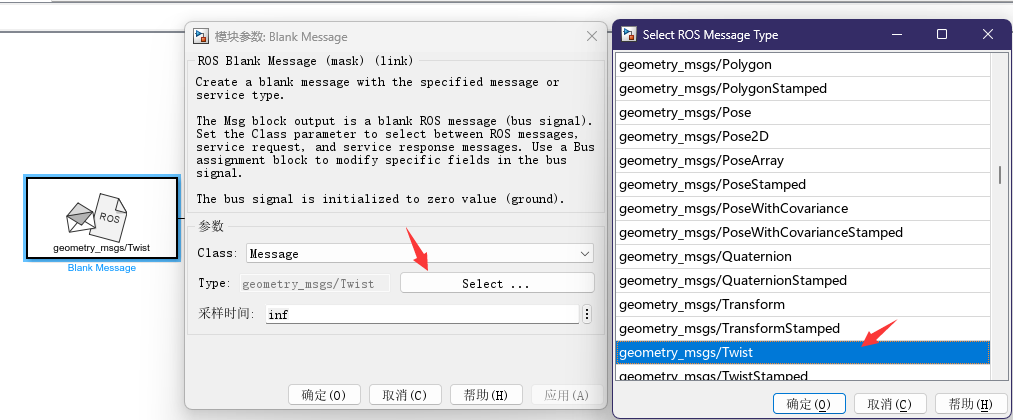
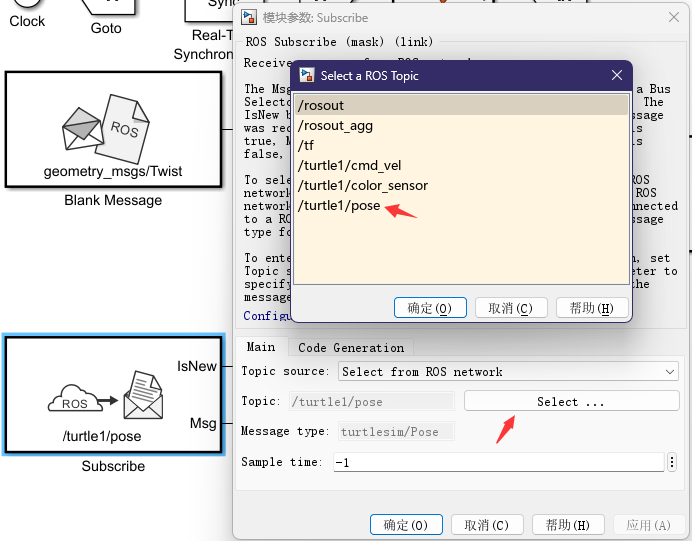
Blank Message
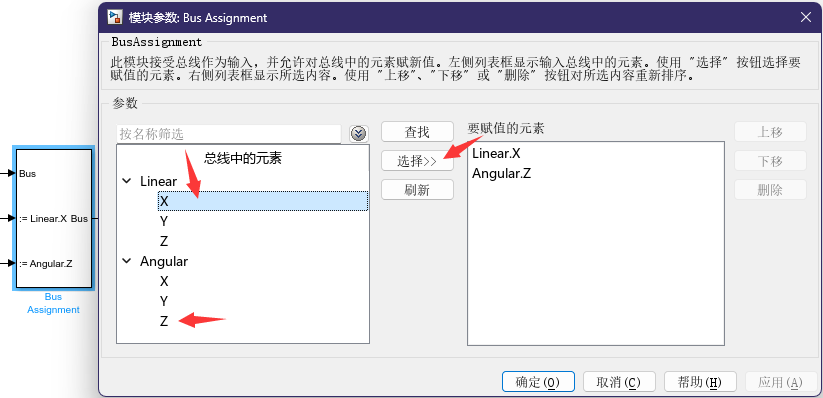
Bus Assignment
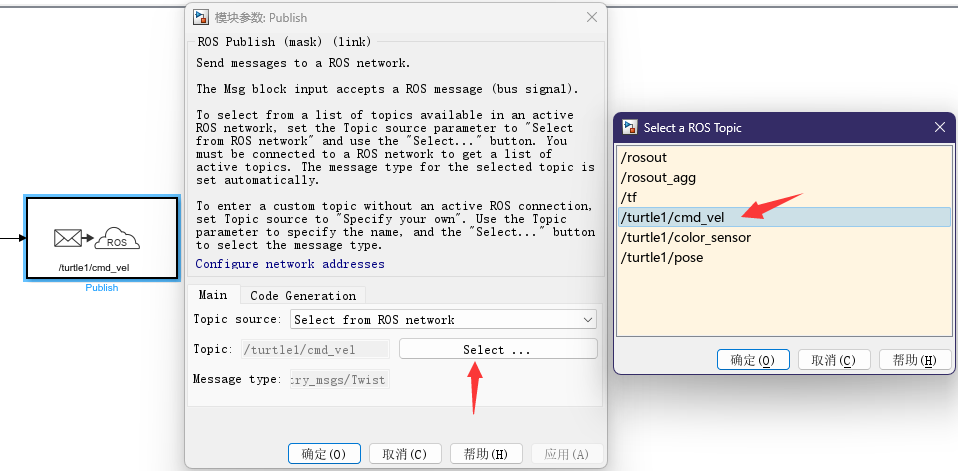
Publish
Subscribe
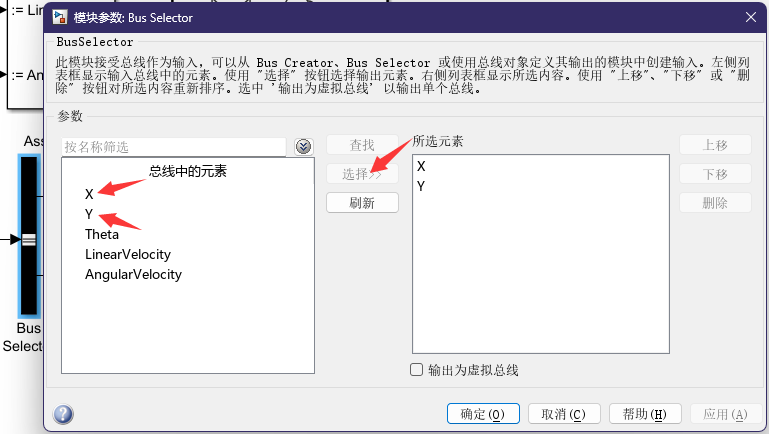
Bus Selector
在 MATLAB function 模块中可以设计函数控制小乌龟的运动,举例如下:
x1function y = fcn(t)23if t > 3 && t < 84y = 0.5;5else6y = 0;7end点击运行后,可以看到小乌龟向前运动了一段距离,
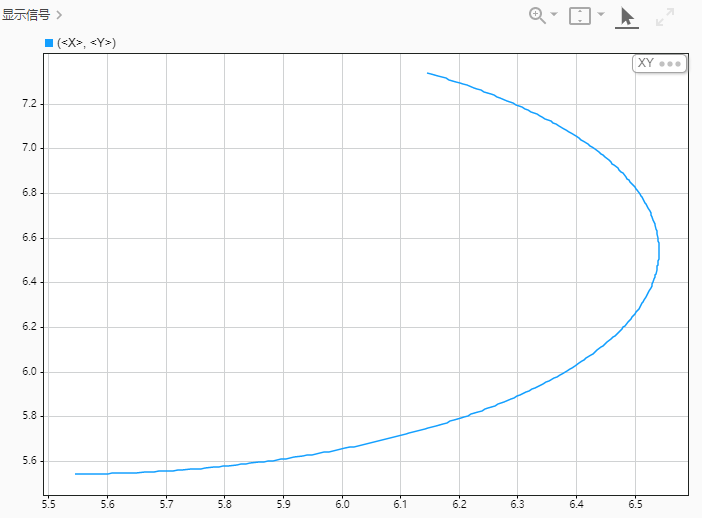
XY Graph模块中可以得到小乌龟的轨迹